Roger Ver Seeks Donald Trump’s Help Amid Potential US Extradition
Roger Ver Seeks Donald Trump’s Help Amid Potential US Extradition  MEXC’s Insurance Fund Account Provides $414M+ to Mitigate Traders’ Bankruptcy Losses
MEXC’s Insurance Fund Account Provides $414M+ to Mitigate Traders’ Bankruptcy Losses  Arkham Exchange Lists MELANIA for Spot and Perpetual Trading
Arkham Exchange Lists MELANIA for Spot and Perpetual Trading  CFTC Announces Public Roundtables to Discuss Crypto Markets
CFTC Announces Public Roundtables to Discuss Crypto Markets  Bitcoin Taker Order Bearish Pressure Hits Highest Level Since January 9 – Market Remains Stable For Now
Bitcoin Taker Order Bearish Pressure Hits Highest Level Since January 9 – Market Remains Stable For Now 














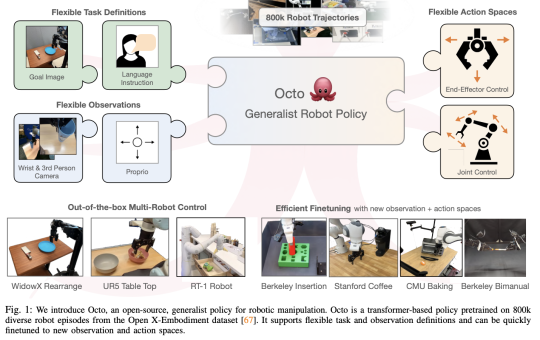
Octo: An Open-Sourced Large Transformer-based Generalist Robot Policy Trained on 800k Trajectories from the Open X-Embodiment Dataset
Regarding robotic learning, the standard practice is to use datasets tailored to the particular robot and job at hand to...